Data Flows#
The app_edgeai application at a high level can be split into 3 parts,
Input pipeline - Grabs a frame from camera, video, image or RTSP source
Output pipeline - Sends the output to display or a file
Compute pipeline - Performs pre-processing, inference and post-processing
Here are the data flows for each reference demo and the corresponding GStreamer launch strings that app_edgeai application generates. User can interact with the application via the Demo Configuration file
Image classification#
In this demo, a frame is grabbed from an input source and split into two paths. The “analytics” path resizes the input maintaining the aspect ratio and crops the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which overlays the detected classes. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=454, height=256 ! tiovxdlcolorconvert out-pool-size=4 ! video/x-raw, format=RGB ! videobox left=115 right=115 top=16 bottom=16 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=123.675000 mean-1=116.280000 mean-2=103.530000 scale-0=0.017125 scale-1=0.017507 scale-2=0.017429 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
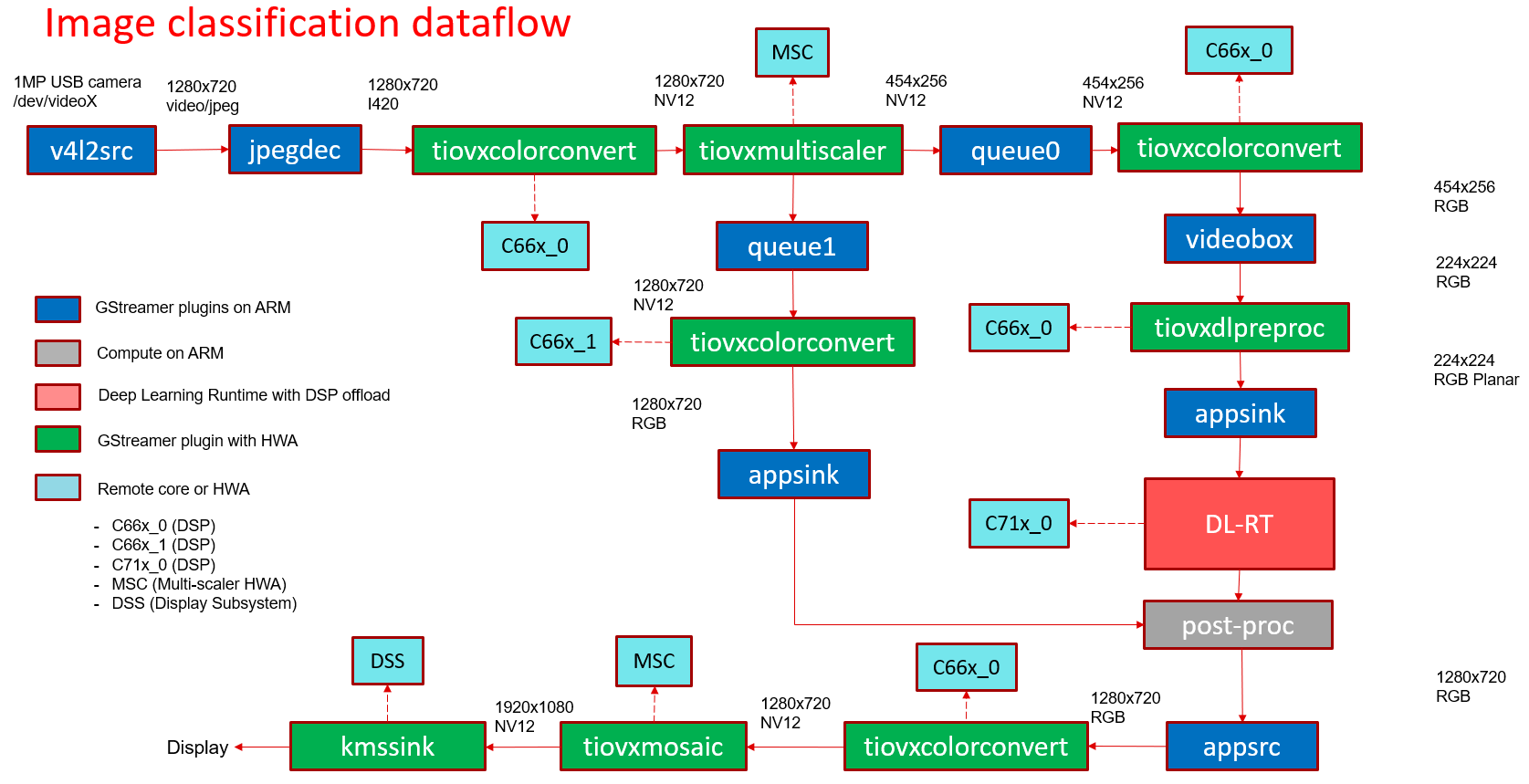
Fig. 387 GStreamer based data-flow pipeline for image classification demo with USB camera and display#
Object Detection#
In this demo, a frame is grabbed from an input source and split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which overlays rectangles around detected objects. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
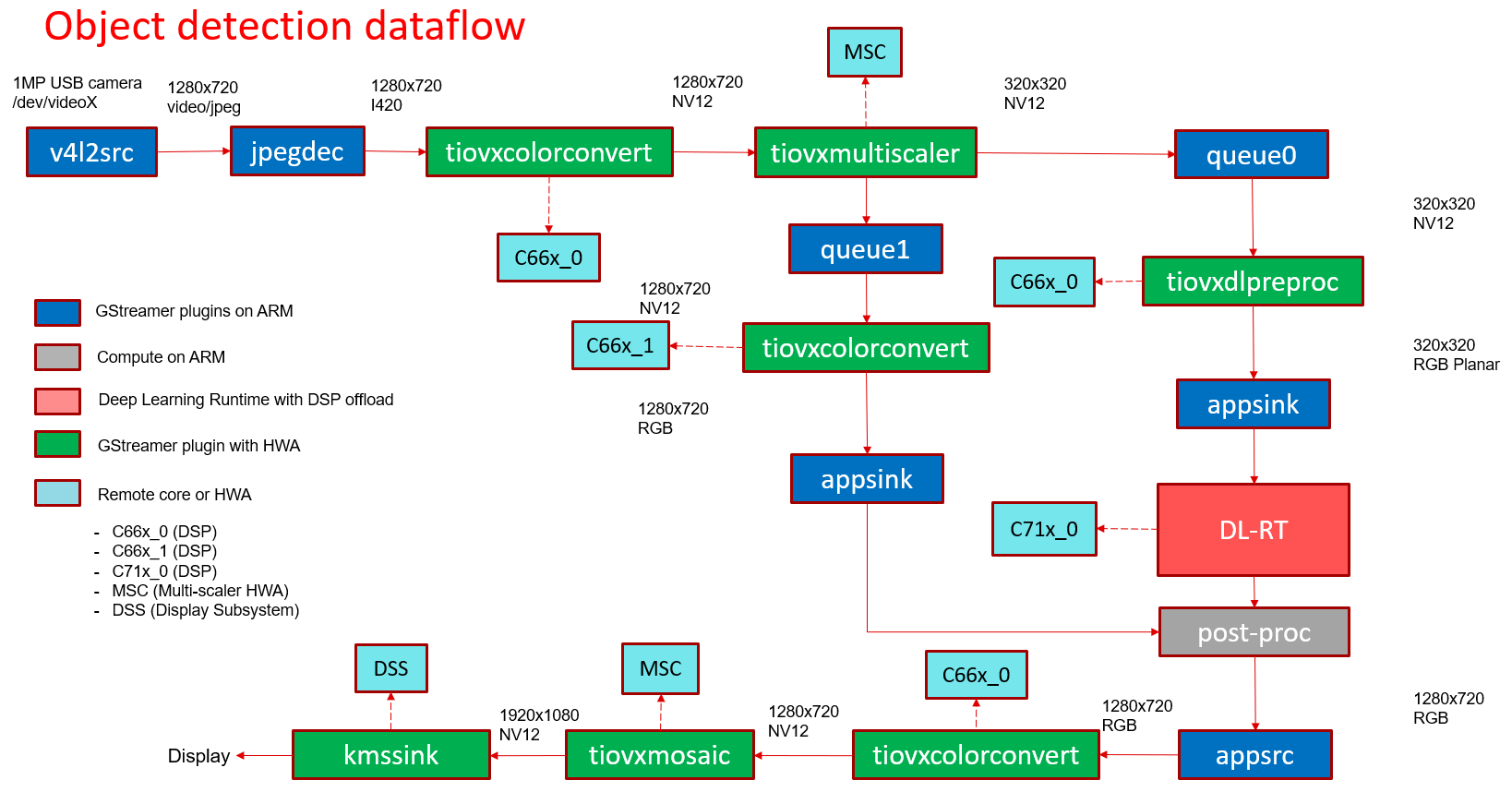
Fig. 388 GStreamer based data-flow pipeline for object detection demo with USB camera and display#
Semantic Segmentation#
In this demo, a frame is grabbed from an input source and split into two paths. The “analytics” path resize the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which blends each segmented pixel to a color map. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=512, height=512 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.015625 scale-1=0.015625 scale-2=0.015625 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
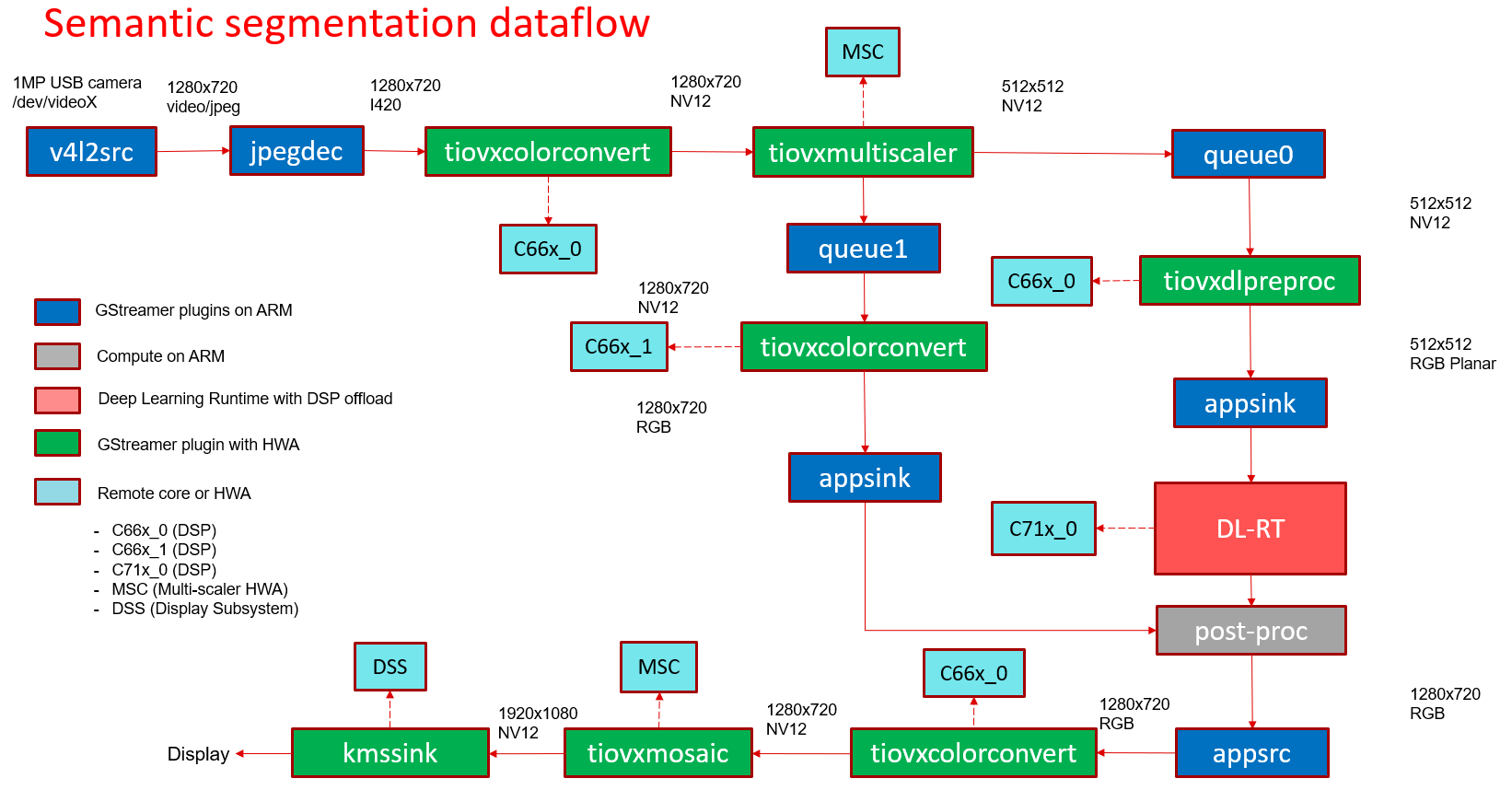
Fig. 389 GStreamer based data-flow pipeline for semantic segmentation demo with USB camera and display#
Human Pose Estimation#
In this demo, a frame is grabbed from an input source and split into two paths. The “analytics” path resize the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which overlays the keypoints and lines to draw the pose. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video2 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=640, height=640 ! tiovxdlpreproc data-type=10 target=0 channel-order=0 mean-0=0.000000 mean-1=0.000000 mean-2=0.000000 scale-0=1.000000 scale-1=1.000000 scale-2=1.000000 tensor-format=bgr out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
tiovxmosaic name=mosaic_0 background=/tmp/background_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
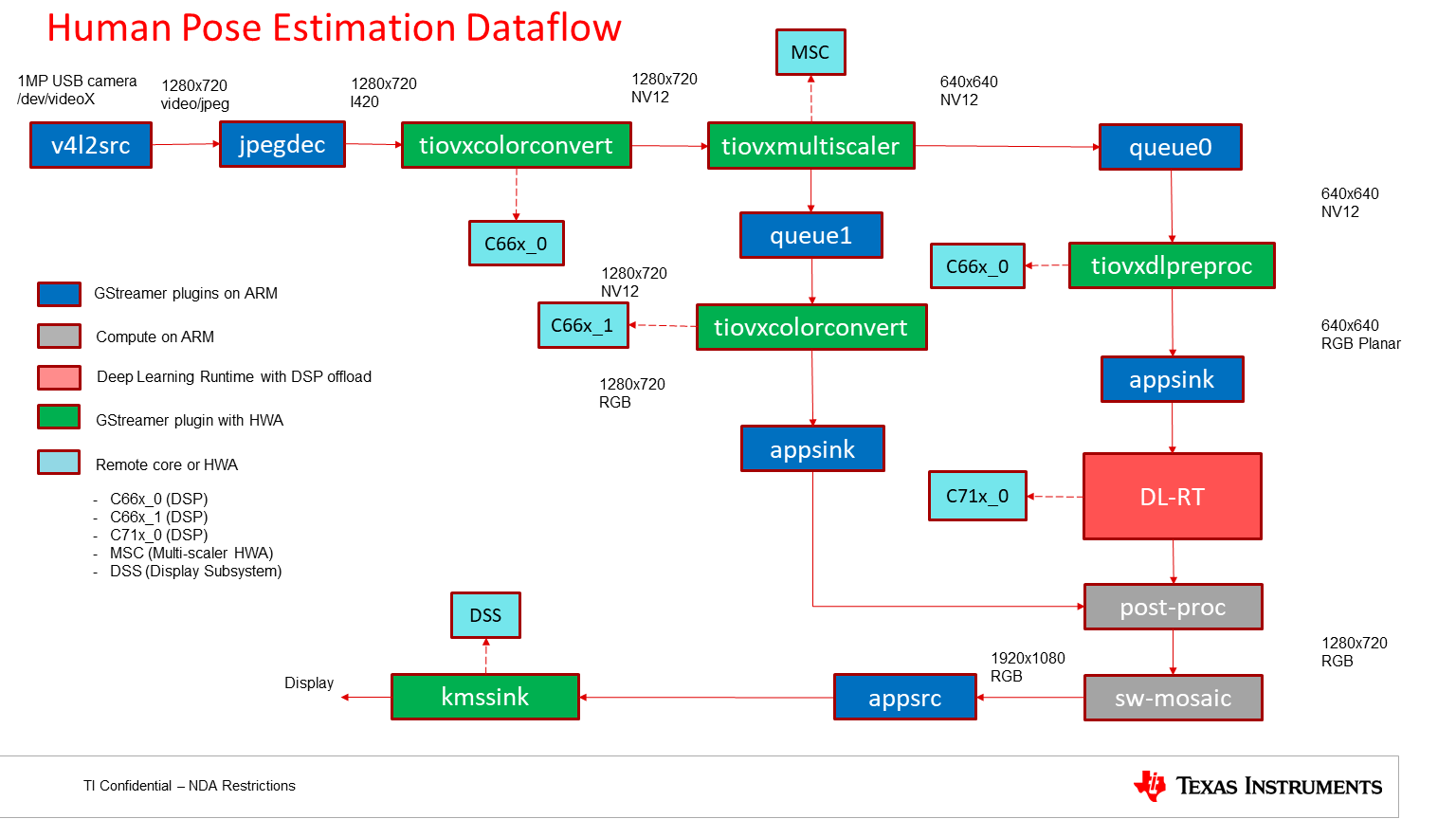
Fig. 390 GStreamer based data-flow pipeline for Human Pose Estimation demo with USB camera and display#
Video source#
In this demo, a video file is read from a known location and passed to a de-muxer to extract audio and video streams, the video stream is parsed and raw encoded information is passed to a HW video decoder. Note that H.264 and H.265 encoded videos are supported, making use of the respective HW decoders. The resulting output is split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which does the required post process required by the model. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
filesrc location=/opt/edge_ai_apps/data/videos/video_0000_h264.mp4 ! qtdemux ! h264parse ! v4l2h264dec ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
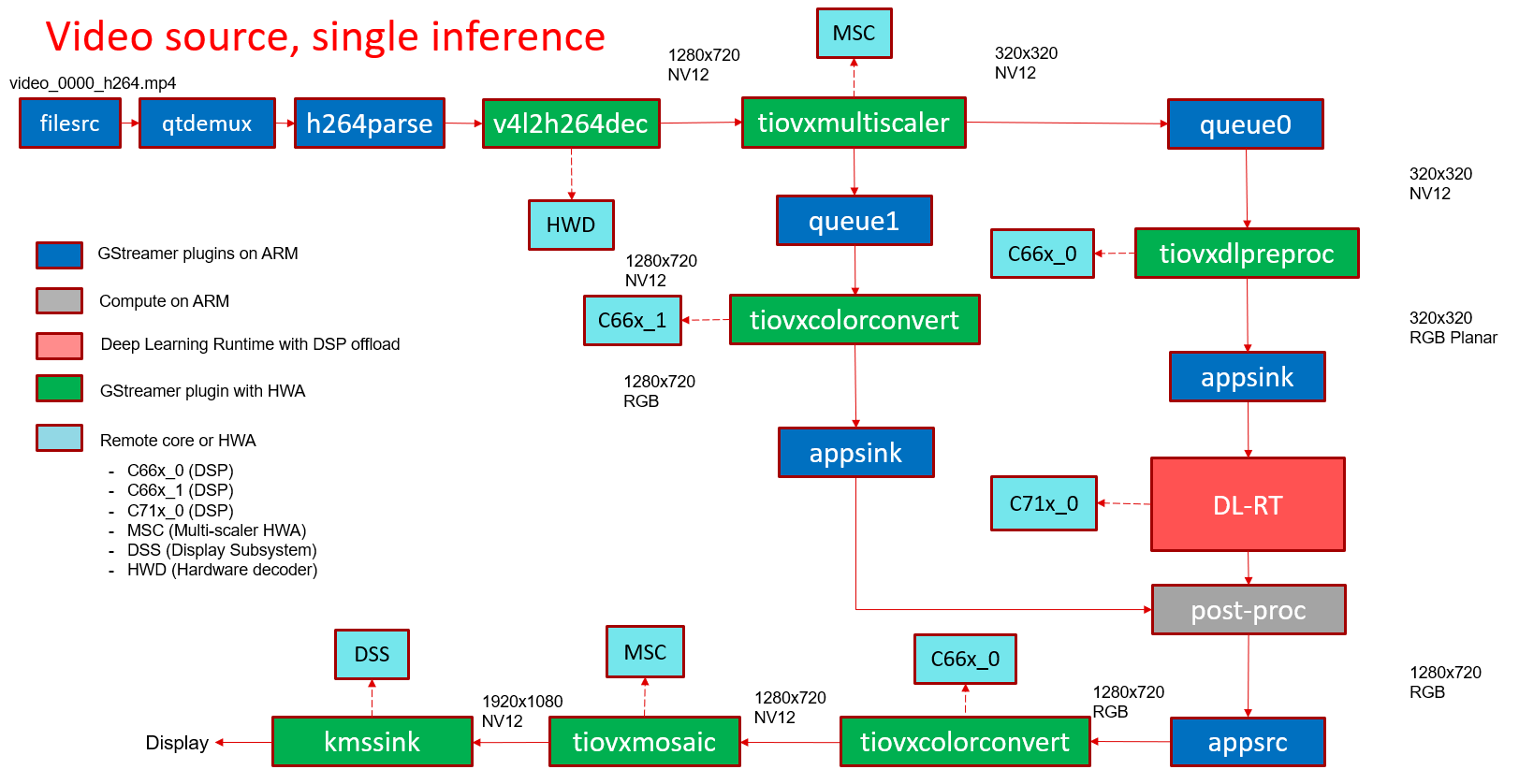
Fig. 391 GStreamer based data-flow pipeline with video file input source and display#
RTSP source#
In this demo, a video file is read from a RTSP source and passed to a de-muxer to extract audio and video streams, the video stream is parsed and raw encoded information is passed to a video decoder and the resulting output is split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which does the required post process required by the model. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
rtspsrc location=rtsp://172.24.145.220:8554/test latency=0 buffer-mode=auto ! rtph264depay ! h264parse ! v4l2h264dec ! video/x-raw, format=NV12 !tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
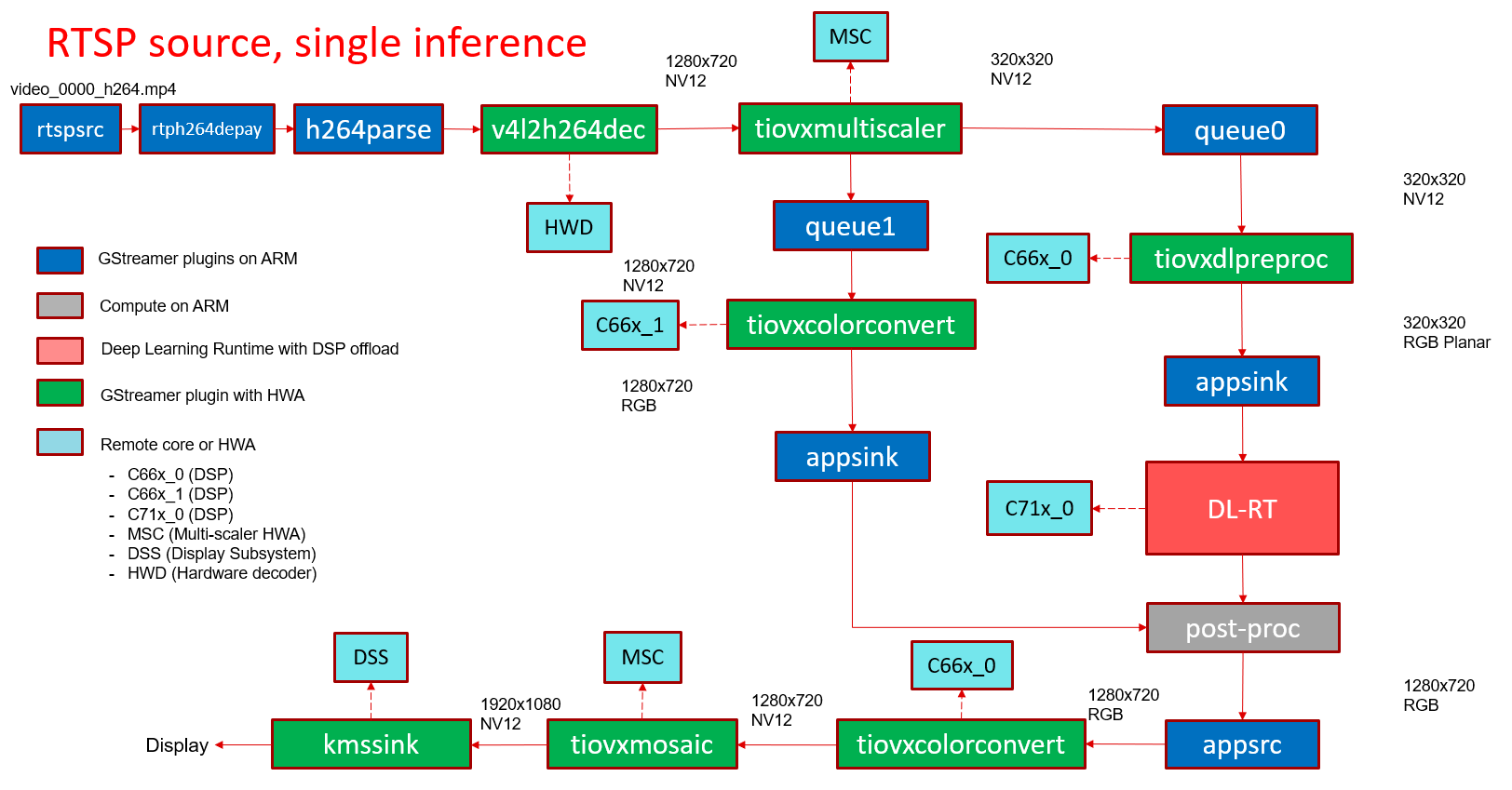
Fig. 392 GStreamer based data-flow pipeline with RTSP based video file source and display#
RPiV2 Camera Sensor (IMX219)#
In this demo, raw frames in SRGGB8 format are captured form RPiV2 (imx219) camera sensor. VISS (Vision Imaging Subsystem) is used to process the raw frames and get the output in NV12, VISS also cotrols the sensor parameters like exposure, gain etc.. via v4l2 ioctls. The NV12 output is split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which does the required post process required by the model. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video2 io-mode=5 ! video/x-bayer, width=1920, height=1080, format=rggb ! tiovxisp device=/dev/v4l-subdev2 dcc-isp-file=/opt/imaging/imx219/dcc_viss.bin dcc-2a-file=/opt/imaging/imx219/dcc_2a.bin format-msb=7 ! video/x-raw, format=NV12 ! tiovxmultiscaler ! video/x-raw, width=1280, height=720 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
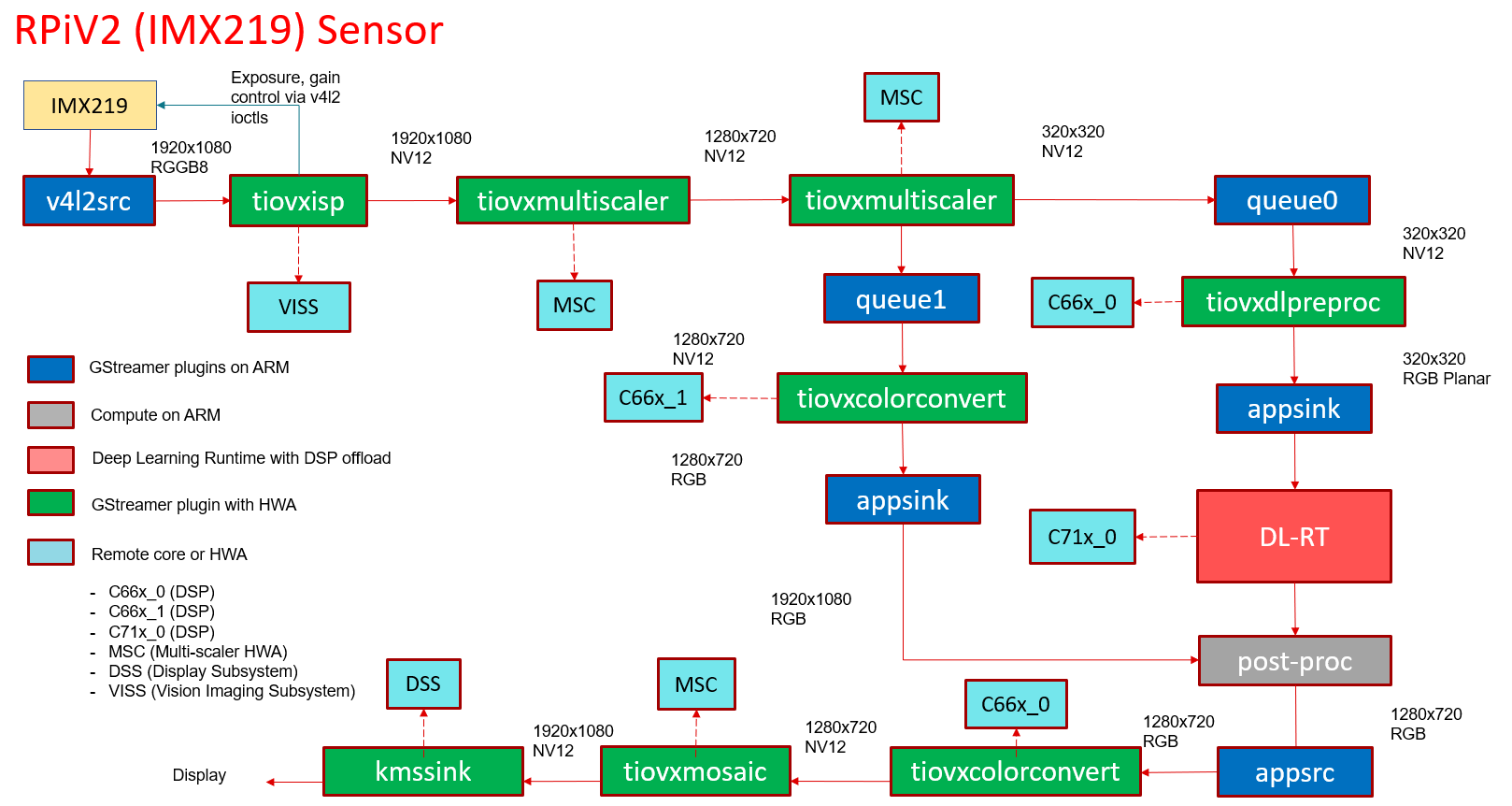
Fig. 393 GStreamer based data-flow pipeline with IMX219 sensor, ISP and display#
IMX390 Camera Sensor#
In this demo, raw frames in SRGGB12 format are captured from IMX390 camera sensor. VISS (Vision Imaging Subsystem) is used to process the raw frames and get the output in NV12, VISS also controls the sensor parameters like exposure, gain etc.. via v4l2 ioctls. This is followed by LDC (Lens Distortion Correction) required due to the fisheye lens. The NV12 output is split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which does the required post process required by the model. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 ! queue leaky=2 ! video/x-bayer, width=1936, height=1100, format=rggb12 ! tiovxisp sink_0::device=/dev/v4l-subdev7 sensor-name=IMX390-UB953_D3 dcc-isp-file=/opt/imaging/imx390/dcc_viss.bin sink_0::dcc-2a-file=/opt/imaging/imx390/dcc_2a.bin format-msb=11 ! video/x-raw, format=NV12 ! tiovxldc dcc-file=/opt/imaging/imx390/dcc_ldc.bin sensor-name=IMX390-UB953_D3 ! video/x-raw, format=NV12, width=1920, height=1080 !tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=512, height=512 ! tiovxdlpreproc data-type=3 target=0 channel-order=0 tensor-format=bgr out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
tiovxmosaic name=mosaic_0 background=/tmp/background_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
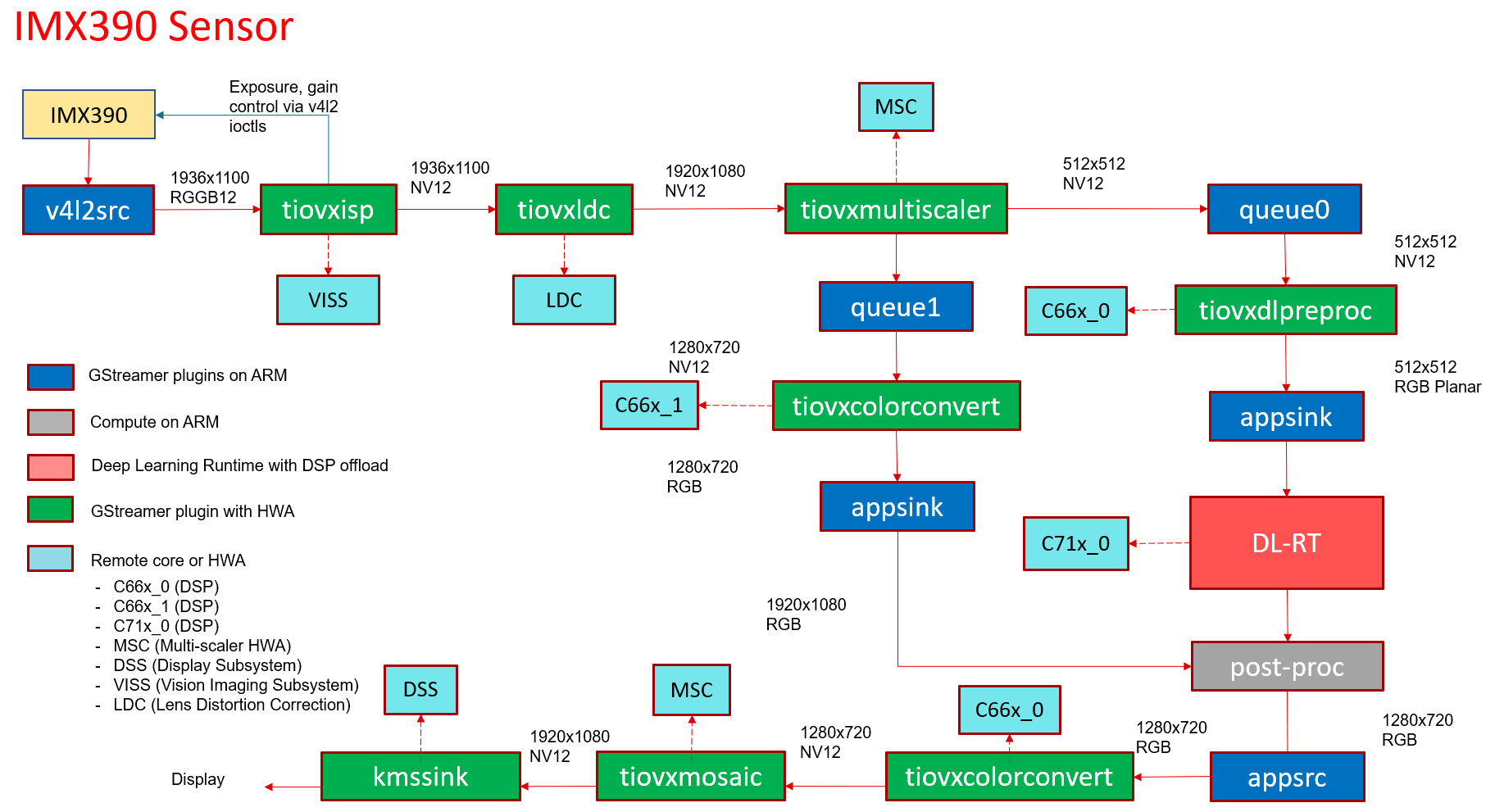
Fig. 394 GStreamer based data-flow pipeline with IMX390 sensor, ISP, LDC and display#
Video output#
In this demo, a frame is grabbed from an input source and split into two paths. The “analytics” path resizes the input to match the resolution required to run the deep learning network. The “visualization” path is provided to the post-processing module which does the required post process required by the model. Post-processed output is given to HW mosaic plugin which positions and resizes the output window on an empty background. Finally the video is encoded using the H.264 HW encoder and written to a video file.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tiovxmultiscaler name=split_01
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=1280, height=720 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1280, height=720 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=1280 sink_0::height=720
! video/x-raw,format=NV12, width=1920, height=1080 ! v4l2h264enc bitrate=10000000 ! h264parse ! matroskamux ! filesink location=/opt/edge_ai_apps/data/output/videos/output_video.mkv
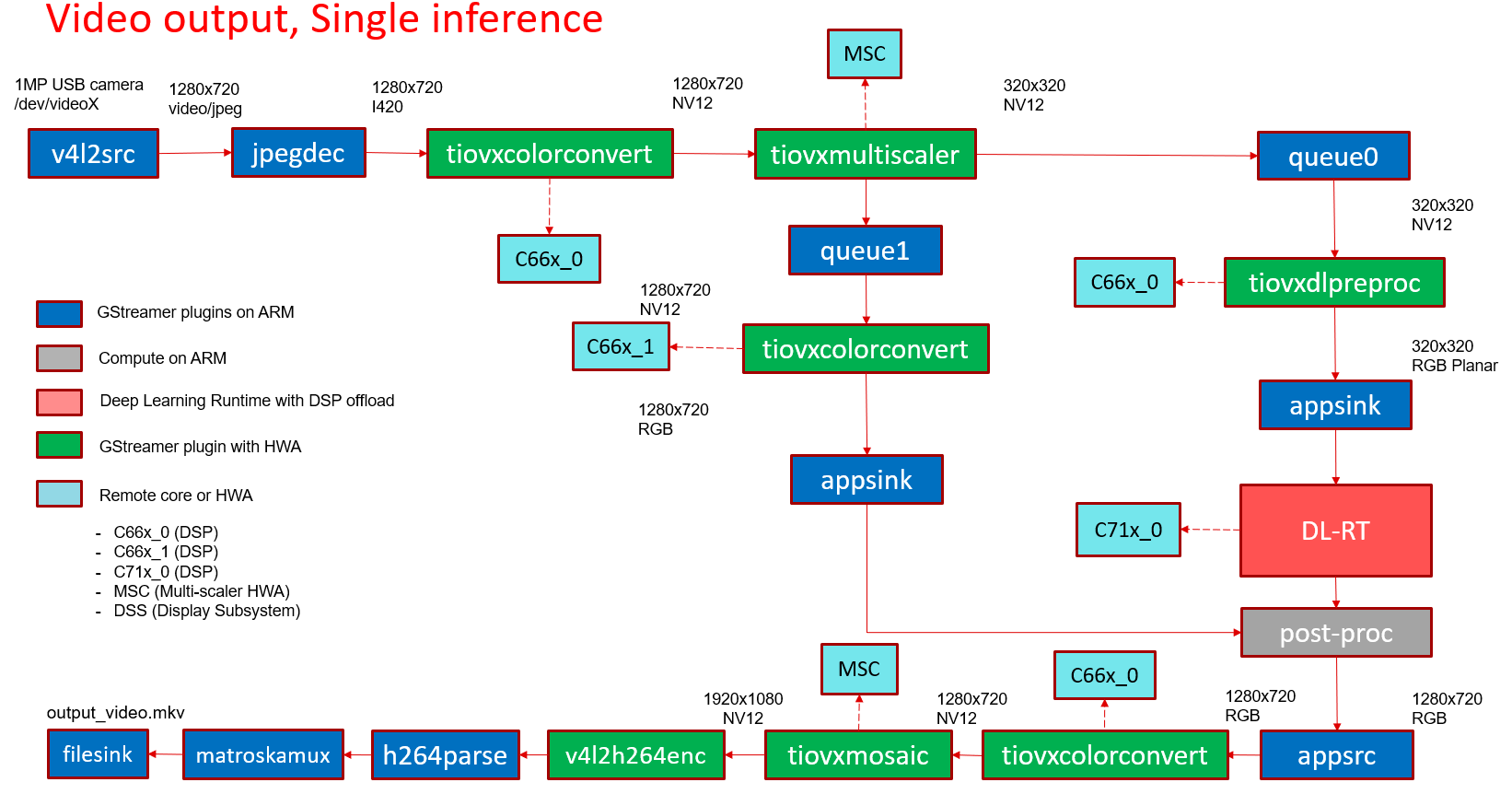
Fig. 395 GStreamer based data-flow pipeline with video file input source and display#
Single Input Multi inference#
In this demo, a frame is grabbed from an input source and split into multiple paths. Each path is further split into two sub-paths one for analytics and another for visualization. Each path can run any type of network, image classification, object detection, semantic segmentation and using any supported run-time.
For example the below GStreamer pipeline splits the input into 4 paths for running 4 deep learning networks. First is a semantic segmentation network, followed by object detection network, followed by two image classification networks. If we look at the image classification path, the analytics sub-path resizes the input to maintain the aspect ratio and crops the input to match the resolution required to run the deep learning network. The visualization sub-path is provided to the post-processing module which overlays the detected classes. Post-processed output from all the 4 paths is given to HW mosaic plugin which positions and resizes the output windows on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tee name=tee_split0
tee_split0. ! queue ! tiovxmultiscaler name=split_01
tee_split0. ! queue ! tiovxmultiscaler name=split_02
tee_split0. ! queue ! tiovxmultiscaler name=split_03
tee_split0. ! queue ! tiovxmultiscaler name=split_04
split_01. ! queue ! video/x-raw, width=512, height=512 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.015625 scale-1=0.015625 scale-2=0.015625 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
split_02. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_1 max-buffers=2 drop=true
split_02. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_1 max-buffers=2 drop=true
split_03. ! queue ! video/x-raw, width=454, height=256 ! tiovxdlcolorconvert out-pool-size=4 ! video/x-raw, format=RGB ! videobox left=115 right=115 top=16 bottom=16 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_2 max-buffers=2 drop=true
split_03. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_2 max-buffers=2 drop=true
split_04. ! queue ! video/x-raw, width=454, height=256 ! tiovxdlcolorconvert out-pool-size=4 ! video/x-raw, format=RGB ! videobox left=115 right=115 top=16 bottom=16 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=123.675000 mean-1=116.280000 mean-2=103.530000 scale-0=0.017125 scale-1=0.017507 scale-2=0.017429 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_3 max-buffers=2 drop=true
split_04. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_3 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_1 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_1
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_2 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_2
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_3 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_3
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=640 sink_0::height=360
sink_1::startx=960 sink_1::starty=180 sink_1::width=640 sink_1::height=360
sink_2::startx=320 sink_2::starty=560 sink_2::width=640 sink_2::height=360
sink_3::startx=960 sink_3::starty=560 sink_3::width=640 sink_3::height=360
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
Multi Input Multi inference#
In this demo, a frame is grabbed from multiple input sources and split into multiple paths. The multiple input sources could be either multiple cameras or a combination of camera, video, image, RTSP source. Each path is further split into two sub-paths one for analytics and another for visualization. Each path can run any type of network, image classification, object detection, semantic segmentation and using any supported run-time.
For example the below GStreamer pipeline splits two inputs into 4 paths for running 2 deep learning networks. First is a object detection network, followed by image classification networks. If we look at the image classification path, the analytics sub-path resizes the input to maintain the aspect ratio and crops the input to match the resolution required to run the deep learning network. The visualization sub-path is provided to the post-processing module which overlays the detected classes. Post-processed output from all the 4 paths is given to HW mosaic plugin which positions and resizes the output windows on an empty background before sending to display.
GStreamer input pipeline:
v4l2src device=/dev/video18 io-mode=2 ! image/jpeg, width=1280, height=720 ! jpegdec ! tiovxdlcolorconvert ! video/x-raw, format=NV12 ! tee name=tee_split0
tee_split0. ! queue ! tiovxmultiscaler name=split_01
tee_split0. ! queue ! tiovxmultiscaler name=split_02
split_01. ! queue ! video/x-raw, width=320, height=320 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_0 max-buffers=2 drop=true
split_01. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_0 max-buffers=2 drop=true
split_02. ! queue ! video/x-raw, width=454, height=256 ! tiovxdlcolorconvert out-pool-size=4 ! video/x-raw, format=RGB ! videobox left=115 right=115 top=16 bottom=16 ! tiovxdlpreproc data-type=10 channel-order=1 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.007812 scale-1=0.007812 scale-2=0.007812 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_1 max-buffers=2 drop=true
split_02. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_1 max-buffers=2 drop=true
filesrc location=/opt/edge_ai_apps/data/videos/video_0000_h264.mp4 ! qtdemux ! h264parse ! v4l2h264dec ! video/x-raw, format=NV12 ! tee name=tee_split1
tee_split1. ! queue ! tiovxmultiscaler name=split_11
tee_split1. ! queue ! tiovxmultiscaler name=split_12
split_11. ! queue ! video/x-raw, width=512, height=512 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=128.000000 mean-1=128.000000 mean-2=128.000000 scale-0=0.015625 scale-1=0.015625 scale-2=0.015625 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_2 max-buffers=2 drop=true
split_11. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_2 max-buffers=2 drop=true
split_12. ! queue ! video/x-raw, width=454, height=256 ! tiovxdlcolorconvert out-pool-size=4 ! video/x-raw, format=RGB ! videobox left=115 right=115 top=16 bottom=16 ! tiovxdlpreproc data-type=10 channel-order=0 mean-0=123.675000 mean-1=116.280000 mean-2=103.530000 scale-0=0.017125 scale-1=0.017507 scale-2=0.017429 tensor-format=rgb out-pool-size=4 ! application/x-tensor-tiovx ! appsink name=pre_3 max-buffers=2 drop=true
split_12. ! queue ! video/x-raw, width=640, height=360 ! tiovxdlcolorconvert target=1 out-pool-size=4 ! video/x-raw, format=RGB ! appsink name=sen_3 max-buffers=2 drop=true
GStreamer output pipeline:
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_0
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_1 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_1
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_2 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_2
appsrc format=GST_FORMAT_TIME is-live=true block=true do-timestamp=true name=post_3 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=640, height=360 ! queue ! mosaic_0.sink_3
appsrc format=GST_FORMAT_TIME block=true num-buffers=1 name=background_0 ! tiovxdlcolorconvert ! video/x-raw,format=NV12, width=1920, height=1080 ! queue ! mosaic_0.background
tiovxmosaic name=mosaic_0
sink_0::startx=320 sink_0::starty=180 sink_0::width=640 sink_0::height=360
sink_1::startx=960 sink_1::starty=180 sink_1::width=640 sink_1::height=360
sink_2::startx=320 sink_2::starty=560 sink_2::width=640 sink_2::height=360
sink_3::startx=960 sink_3::starty=560 sink_3::width=640 sink_3::height=360
! video/x-raw,format=NV12, width=1920, height=1080 ! kmssink sync=false driver-name=tidss
